Projet: Fabrication d’une balise WSPR Mulibande. Elle change de fréquence, se synchronise par GPS en horraire et correction du SI en fréquence. Ceci est encore en construction.
 |
 |
 |
 |
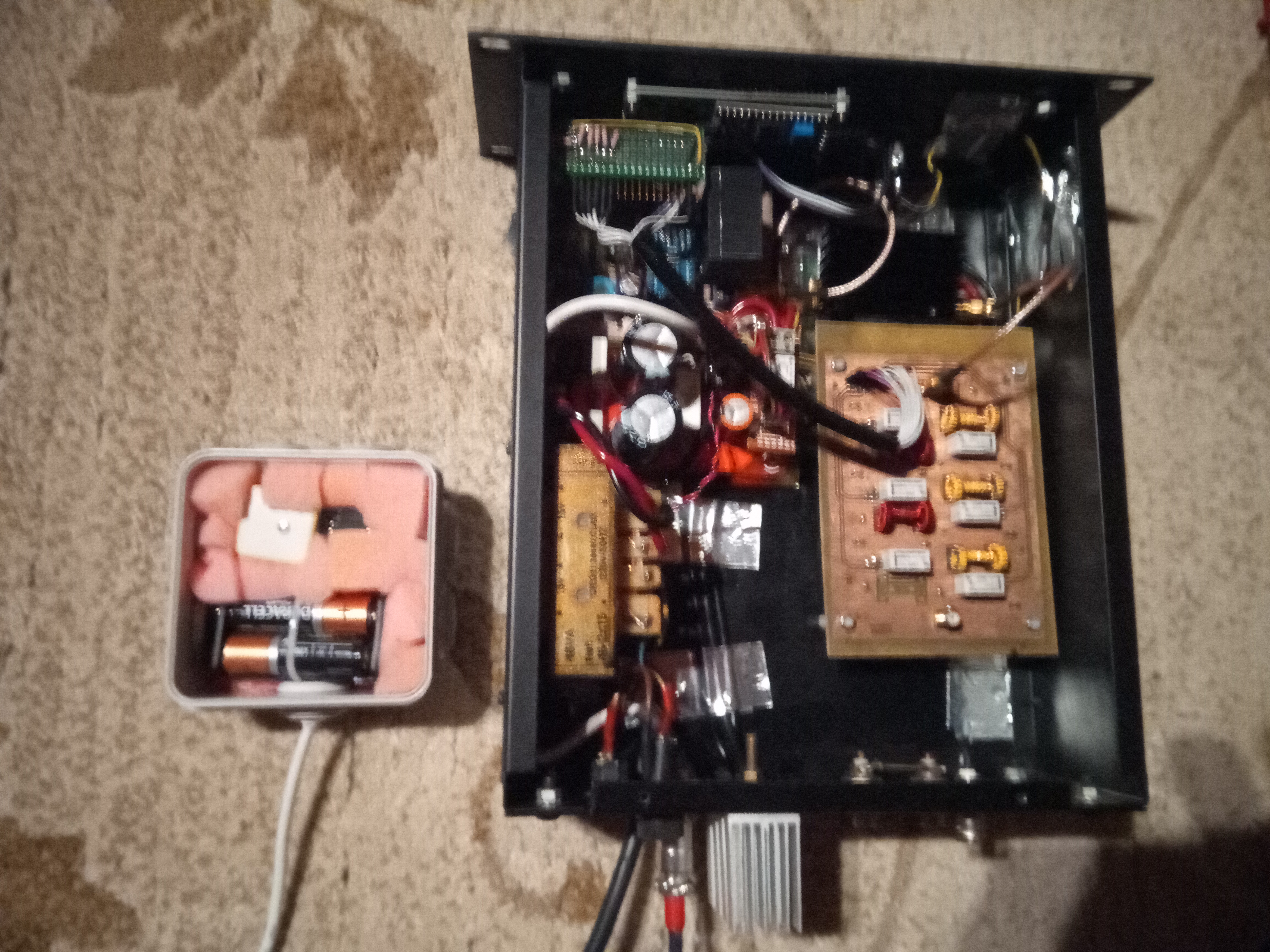
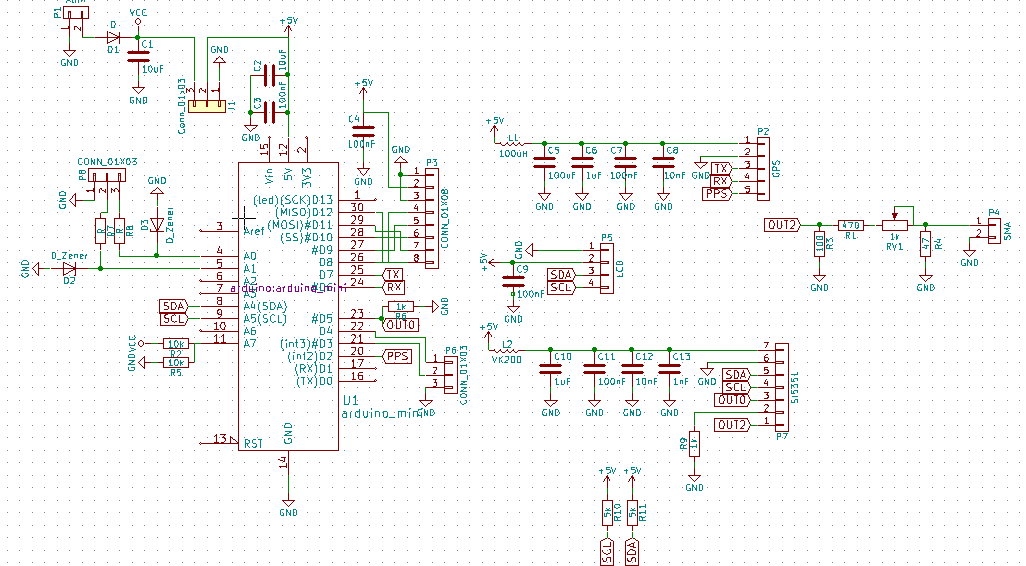
I.La carte mère
1.Le Schema
Kicad file here: main_card_v3
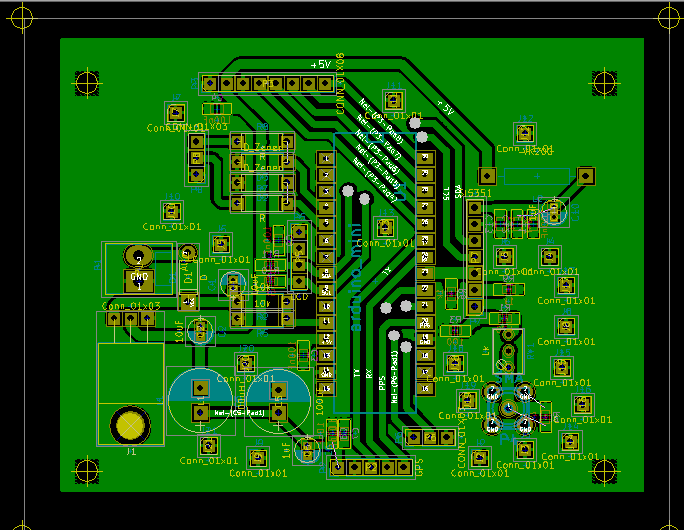
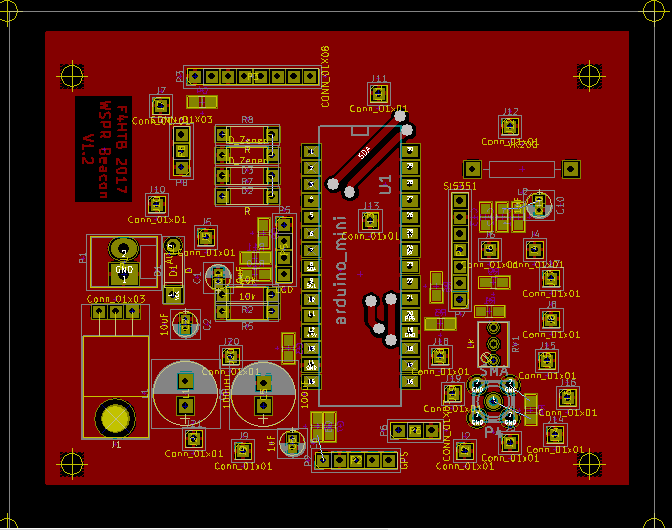
2.PCB
3.Code
Code: bwfinal
Library:libraries
In Arduino 1.8.5
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 |
#include <SoftwareSerial.h> #include <TinyGPS++.h> #include "si5351.h" #include "Wire.h" #include <LiquidCrystal_I2C.h> #include <EEPROM.h> LiquidCrystal_I2C lcd(0x3F, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); Si5351 si5351; SoftwareSerial ss(7, 6); TinyGPSPlus gps; String inputStringUSBSerial = ""; boolean stringCompleteUSBSerial = false; #define ppsPin 2 #define PAPin 3 // Broches d'adresse filtres antennes const byte PIN_ADDR_A = 8; const byte PIN_ADDR_B = 9; const byte PIN_ADDR_C = 10; const byte PIN_ADDR_D = 11; // Broche de signal filtres antennes const byte PIN_SIG = 12; #define resetantenna 6 unsigned int tcount = 2; unsigned long mult = 0; int32_t measdif = 0, measdif_old = 2147483647, calfact = 0, calfact_old = 0; uint64_t meas_freqC = 0; volatile boolean CorectFlag = false; volatile boolean CorectFlagCycle = false; volatile boolean sendTX = false; volatile bool s_GpsOneSecTick = false; volatile boolean LCDpoint = false; char txCall[] = "F4HTB"; char txLoc[] = "JJ00";//"JJ00"; char txPow[] = "30"; byte sec = 0; volatile bool synctime = false; byte cycle = 0; byte WSPRSISymb[162]; bool WSPRSISymbGen = 0; unsigned long Frequencys[20] = {};//{0,14095600L, 14095600L, 0, 14095600L, 14095600L};//Frequency by cycle byte FtoAnt[20] = {};//{1,1, 2, 1, 2, 1}; //antenna by cycle #define ncycles 19 //0 to n ° cycles //****************************************************************** // Others functions //****************************************************************** void waitticks() { while (!s_GpsOneSecTick) { delayMicroseconds(100); } } /***************************************************************** write for filters and antenna *****************************************************************/ void writeAnalogMux(byte channel) { // On disable la valeur courante digitalWrite(PIN_SIG, LOW); delayMicroseconds(100); // On selectionne la voie digitalWrite(PIN_ADDR_A, bitRead(channel, 0)); digitalWrite(PIN_ADDR_B, bitRead(channel, 1)); digitalWrite(PIN_ADDR_C, bitRead(channel, 2)); digitalWrite(PIN_ADDR_D, bitRead(channel, 3)); delayMicroseconds(100); // On ecrit la valeur courante digitalWrite(PIN_SIG, HIGH); delay(10); } void selectfilter(long freqf = 0, int filter = 1) { if (freqf != 0) { if (freqf > 30000000) { filter = 1; } else if (freqf < 2000000) { filter = 2; } else if (freqf < 4000000) { filter = 3; } else if (freqf < 10500000) { filter = 4; } else if (freqf < 21000000) { filter = 5; } else if (freqf < 30000000) { filter = 6; } } writeAnalogMux((filter - 1)); } void selectantenna(int antenna) { antenna += 6; writeAnalogMux(resetantenna); delayMicroseconds(100); writeAnalogMux(antenna); } //****************************************************************** // LCD Function //****************************************************************** void lcdmess(String mess, int line) { while (mess.length() < 16)mess = mess + " "; lcd.home (); lcd.setCursor(0, line); lcd.print(mess); } void LCDprintpoint() { lcd.setCursor(15, 1); if (LCDpoint) { lcd.print("."); } else { lcd.print(" "); } LCDpoint = ! LCDpoint; } //****************************************************************** // Clock correction functions //****************************************************************** void PPSinterrupt() { if (!CorectFlagCycle)tcount++; if (tcount == 4) // Start counting the 2.5 MHz signal from Si5351A CLK0 { TCCR1B = 7; //Clock on rising edge of pin 5 } else if (tcount == 44) //The 40 second gate time elapsed - stop counting { TCCR1B = 0; //Turn off counter meas_freqC = mult * 0x10000 + TCNT1; CorectFlag = true; TCNT1 = 0; //Reset count to zero mult = 0; tcount = 0; //Reset the seconds counter } sec++; if (sec >= 120)sec = 0; s_GpsOneSecTick = true; } void correctFreqSI() { measdif = (int32_t)(meas_freqC - (uint64_t)(100000000)); // Error E calculation calfact = (measdif * 5) + calfact_old; // compute the new calfact if ((abs(measdif_old) <= abs(measdif))) { calfact = calfact_old; if (calfact != 0)CorectFlagCycle = true; measdif_old = 2147483647; } else { CorectFlagCycle = false; calfact_old = calfact; } si5351.set_correction(calfact, SI5351_PLL_INPUT_XO); si5351.set_freq(250000000ULL, SI5351_CLK2); measdif_old = measdif; lcdmess("CalFact " + String(calfact) + " " + String(CorectFlagCycle), 1); CorectFlag = false; } // Timer 1 overflow intrrupt vector. ISR(TIMER1_OVF_vect) { mult++; //Increment multiplier TIFR1 = (1 << TOV1); //Clear overlow flag } //****************************************************************** // Locator calculation function //****************************************************************** void calcLocator(char *dst, double lat, double lon) { int o1, o2, o3; int a1, a2, a3; double remainder; // longitude remainder = lon + 180.0; o1 = (int)(remainder / 20.0); remainder = remainder - (double)o1 * 20.0; o2 = (int)(remainder / 2.0); remainder = remainder - 2.0 * (double)o2; o3 = (int)(12.0 * remainder); // latitude remainder = lat + 90.0; a1 = (int)(remainder / 10.0); remainder = remainder - (double)a1 * 10.0; a2 = (int)(remainder); remainder = remainder - (double)a2; a3 = (int)(24.0 * remainder); dst[0] = (char)o1 + 'A'; dst[1] = (char)a1 + 'A'; dst[2] = (char)o2 + '0'; dst[3] = (char)a2 + '0'; } //****************************************************************** // Function for wait time to send //****************************************************************** void gpsgatetime () { if (CorectFlagCycle) { cycle++; while ((Frequencys[cycle] == -1) && (cycle != ncycles))cycle++; if (cycle == ncycles)cycle = 0; if (Frequencys[cycle] == 0) { selectfilter(); CorectFlagCycle = false; synctime = false; } } if (Frequencys[cycle] != 0)TX(); } //****************************************************************** // TX Function //****************************************************************** void TX() { sendTX = true; selectantenna(FtoAnt[cycle]); selectfilter(Frequencys[cycle]); digitalWrite(PAPin, HIGH); long freqWSPRSI = (Frequencys[cycle] + (long)(random(145, 155) * 10)) * 100; lcdmess(String(freqWSPRSI) + " C" + String(cycle) + " A" + String(FtoAnt[cycle]), 0); dtxinfo(); waitticks(); si5351.output_enable(SI5351_CLK0, 1); for (int element = 0; element < 162; element++) { si5351.set_freq((freqWSPRSI + (WSPRSISymb[element] * 14648) / 100), SI5351_CLK0); delay(680); delayMicroseconds(2666); } si5351.output_enable(SI5351_CLK0, 0); digitalWrite(PAPin, LOW); sendTX = false; } //****************************************************************** // sequence de programmation operateur //****************************************************************** void initcyclesepprom() { for (byte i = 0; i <= ncycles; i++) { Frequencys[i] = EEPROMReadlong(i * 4); } for (byte i = 0; i <= ncycles; i++) { FtoAnt[i] = EEPROMReadlong((i * 4) + 100); delay(1);//bug epprom } for (byte i = 0; i <= 6; i++) { txCall[i] = char(int(EEPROMReadlong(((i * 4) + 400)))); if (txCall[i] == '\0')break; delay(1);//bug epprom } } void savcyclesepprom() { for (byte i = 0; i <= ncycles; i++) { EEPROMWritelong(i * 4, Frequencys[i]); } for (byte i = 0; i <= ncycles; i++) { EEPROMWritelong(((i * 4) + 100), FtoAnt[i]); } for (byte i = 0; i <= sizeof(txCall); i++) { EEPROMWritelong(((i * 4) + 400), int(txCall[i])); } } void showprog() { for (int i = 0; i <= ncycles; i++) { if (Frequencys[i] != -1 && FtoAnt[i] != -1) { Serial.println("C" + String(i) + " freq:" + String(Frequencys[i]) + "hz"); Serial.println("C" + String(i) + " ant:" + String(FtoAnt[i])); } } Serial.println("QRZ " + String(txCall)); } void initprog() { lcdmess(F("Init..."), 0); Serial.println(F("s show infos")); Serial.println(F("d 01 del cycle 1")); Serial.println(F("a cycle/freq/ant add,max 20, (a 01/014095600/3)")); Serial.println(F("q set qrz")); Serial.println(F("r save")); while (inputStringUSBSerial[0] != 'e') { while (Serial.available()) { char inChar = (char)Serial.read(); if (inChar != '\n') { inputStringUSBSerial += inChar; } else { stringCompleteUSBSerial = true; } } if (stringCompleteUSBSerial) { if (inputStringUSBSerial[0] == 'd') { Frequencys[inputStringUSBSerial.substring(2, 4).toInt()] = -1; FtoAnt[inputStringUSBSerial.substring(2, 4).toInt()] = -1; } if (inputStringUSBSerial[0] == 'a') { char tarray[10]; inputStringUSBSerial.substring(5, 14).toCharArray(tarray, sizeof(tarray)); Frequencys[inputStringUSBSerial.substring(2, 4).toInt()] = atol(tarray); FtoAnt[inputStringUSBSerial.substring(2, 4).toInt()] = inputStringUSBSerial.substring(15, 16).toInt(); } if (inputStringUSBSerial[0] == 'r') { savcyclesepprom(); initcyclesepprom(); showprog(); Serial.println(F("You can reset")); } if (inputStringUSBSerial[0] == 's') { showprog(); } if (inputStringUSBSerial[0] == 'q') { inputStringUSBSerial.substring(2, 7).toCharArray(txCall, (inputStringUSBSerial.length() - 1)); } inputStringUSBSerial = ""; stringCompleteUSBSerial = false; } } } void EEPROMWritelong(int address, long value) { //Decomposition from a long to 4 bytes by using bitshift. //One = Most significant -> Four = Least significant byte byte four = (value & 0xFF); byte three = ((value >> 8) & 0xFF); byte two = ((value >> 16) & 0xFF); byte one = ((value >> 24) & 0xFF); //Write the 4 bytes into the eeprom memory. EEPROM.write(address, four); EEPROM.write(address + 1, three); EEPROM.write(address + 2, two); EEPROM.write(address + 3, one); } long EEPROMReadlong(long address) { //Read the 4 bytes from the eeprom memory. long four = EEPROM.read(address); long three = EEPROM.read(address + 1); long two = EEPROM.read(address + 2); long one = EEPROM.read(address + 3); //Return the recomposed long by using bitshift. return ((four << 0) & 0xFF) + ((three << 8) & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF); } //****************************************************************** // Mains //****************************************************************** void setup() { Serial.begin(9600); ////Serial init pinMode(A7, INPUT); pinMode(A0, INPUT); pinMode(A1, INPUT); pinMode(PAPin, OUTPUT); digitalWrite(PAPin, LOW); ss.begin(9600); //SI5351 init -17463 si5351.init(SI5351_CRYSTAL_LOAD_8PF, 0, 0); si5351.set_correction(0, SI5351_PLL_INPUT_XO); si5351.set_pll(SI5351_PLL_FIXED, SI5351_PLLA); si5351.drive_strength(SI5351_CLK2, SI5351_DRIVE_8MA); si5351.drive_strength(SI5351_CLK0, SI5351_DRIVE_8MA); si5351.set_freq(250000000ULL, SI5351_CLK2);// 250000000ULL 259547697 si5351.set_freq(1000000ULL, SI5351_CLK1); si5351.set_freq(1000000ULL, SI5351_CLK0); si5351.output_enable(SI5351_CLK2, 1); si5351.output_enable(SI5351_CLK1, 0); si5351.output_enable(SI5351_CLK0, 0); si5351.update_status(); delay(500); //PPS correction init //Set up Timer1 as a frequency counter - input at pin 5 TCCR1B = 0; //Disable Timer5 during setup TCCR1A = 0; //Reset TCNT1 = 0; //Reset counter to zero TIFR1 = 1; //Reset overflow TIMSK1 = 1; //Turn on overflow flag pinMode(ppsPin, INPUT);// Inititalize GPS 1pps input attachInterrupt(digitalPinToInterrupt(ppsPin), PPSinterrupt, RISING);// Set 1PPS pin 2 for external interrupt input // Place les broches d'adresse en sortie et à LOW pour filtres et antennes pinMode(PIN_SIG, OUTPUT); pinMode(PIN_ADDR_A, OUTPUT); pinMode(PIN_ADDR_B, OUTPUT); pinMode(PIN_ADDR_C, OUTPUT); pinMode(PIN_ADDR_D, OUTPUT); digitalWrite(PIN_SIG, LOW); digitalWrite(PIN_ADDR_A, LOW); digitalWrite(PIN_ADDR_B, LOW); digitalWrite(PIN_ADDR_C, LOW); digitalWrite(PIN_ADDR_D, LOW); lcd.begin (16, 2); lcd.setBacklight(HIGH); lcdmess(F("WSPR Beacon"), 0); lcdmess(F("Tests"), 1); delay(2000); //test antennas last on 1 for (int i = 6; i >= 1; i--) { selectantenna(i); lcdmess("Ant " + String(i), 1); delay(200); } //test filters last on bypass for (int i = 6; i >= 1; i--) { selectfilter(0, i); lcdmess("Fil " + String(i), 1); delay(200); } lcdmess(txCall, 1); Serial.println(F("Send key go init")); initcyclesepprom(); delay(5000); if (Serial.available()) { initprog(); } } void loop() { while (synctime) { waitticks(); if (!sendTX) { if (CorectFlag && (Frequencys[cycle] == 0))correctFreqSI(); if (sec == 0)gpsgatetime(); lcdmess("Sleep C" + String(cycle) + " " + String(sec) + " s" , 0); LCDprintpoint(); } s_GpsOneSecTick = false; } while (!synctime) { synctimegps(); } dtxinfo(); } void synctimegps() { waitticks(); waitticks(); if (ss.available()) { if (gps.encode(ss.read())) { if (gps.location.isUpdated()) { if (strcmp(txLoc, "JJ00") == 0) { calcLocator(txLoc, gps.location.lat(), gps.location.lng()); if (WSPRSISymbGen == 0)WSPRSIEncode(txCall, txLoc, txPow); s_GpsOneSecTick = false; } else if (gps.date.isValid() && gps.time.isValid() && (int(gps.time.second()) > 2)) { sec = int(gps.time.second()) + (int((gps.time.minute() % 2 )) * 60); s_GpsOneSecTick = false; waitticks(); synctime = true; ss.end(); } } else if (s_GpsOneSecTick) { s_GpsOneSecTick = false; lcdmess(F("GPS Sync."), 0); LCDprintpoint(); } } } else { if (!ss.isListening())ss.begin(9600); ss.flush(); } } void dtxinfo(){ lcdmess(String((char*)txCall) + " " + String((char*)txLoc) + " " + String((char*)txPow) + "d", 1); } /************************************************************************* WSPRSI message encoder http://www.g4jnt.com/Coding%5CWSPRSI_Coding_Process.pdf **************************************************************************/ void WSPRSIEncode(char * callWSPRSIProc, char * locWSPRSIProc, char * powWSPRSIProc) { char callsign[] = " "; char encode_call[] = " "; char locator[] = " "; char power[] = "00"; byte pwr_lvl; char ch; int counter = 0; ch = *callWSPRSIProc++; while (ch != '\0') { callsign[counter] = ch; ch = *callWSPRSIProc++; counter++; } counter = 0; ch = *locWSPRSIProc++; while (ch != '\0') { locator[counter] = ch; ch = *locWSPRSIProc++; counter++; } counter = 0; ch = *powWSPRSIProc++; while (ch != '\0') { power[counter] = ch; ch = *powWSPRSIProc++; counter++; } for (int i = 0; i < 6; i++) { if (callsign[i] == ' ') { callsign[i] = callsign[i] + 4; } else if (callsign[i] > 47 && callsign[i] < 58) { callsign[i] = callsign[i] - 48; } else if (callsign[i] > 64 && callsign[i] < 91) { callsign[i] = callsign[i] - 55; } else if (callsign[i] > 96 && callsign[i] < 123) { callsign[i] = callsign[i] - 87; } } if (callsign[2] > 9) { encode_call[0] = 36; for (int i = 0; i < 5; i++) { encode_call[i + 1] = callsign [i]; } } /***************************************************************** Callsign encoding *****************************************************************/ unsigned long N; N = encode_call[0]; N = 36 * N + encode_call[1]; N = 10 * N + encode_call[2]; N = 27 * N + encode_call[3] - 10; N = 27 * N + encode_call[4] - 10; N = 27 * N + encode_call[5] - 10; /***************************************************************** Locator encoding *****************************************************************/ unsigned long M1; for (int i = 0; i < 4; i++) { if (locator[i] > 64 && locator[i] < 83) { locator[i] = locator[i] - 65; } else if (locator[i] > 96 && locator[i] < 123) { locator[i] = locator[i] - 97; } else if (locator[i] > 47 && locator[i] < 58) { locator[i] = locator[i] - 48; } } M1 = 180 * (179 - 10 * locator[0] - locator[2]) + 10 * locator[1] + locator[3]; /***************************************************************** Power encoding *****************************************************************/ pwr_lvl = 10 * (power[0] - '0') + power[1] - '0'; /***************************************************************** Locator + power packing *****************************************************************/ unsigned long M; M = 128 * M1 + pwr_lvl + 64; /***************************************************************** Bit packing *****************************************************************/ unsigned char c[11]; c[0] = N >> 20; // 8 MSB c[1] = N >> 12; // 8 next c[2] = N >> 4; // 8 next c[3] = N << 4; // 4 LSB -> 4 MSB c[3] c[3] = c[3] + (0x0f & M >> 18); c[4] = M >> 10; c[5] = M >> 2; c[6] = M << 6; c[7] = 0; c[8] = 0; c[9] = 0; c[10] = 0; /***************************************************************** Convolutional encoding *****************************************************************/ unsigned long reg = 0; int conv; int conv_byte = 0; int compt_bits = 0; byte S[162]; conv = c[0]; int m = 0; for (int i = 0; i < 81; i++) { if (compt_bits % 8 == 0) { conv = c[conv_byte]; conv_byte++; } reg = reg | bitRead(conv, 7); S[m++] = WSPRSIparity(reg & 0xf2d05351); S[m++] = WSPRSIparity(reg & 0xe4613c47); compt_bits++; conv = conv << 1; reg = reg << 1; } /***************************************************************** Interleaving *****************************************************************/ byte D[162]; int p = 0; byte temp = 0; int j = 0; for (int i = 0; i < 256; i++) { j = i; temp = j; for (int k = 0; k < 8; k++) { bitWrite(j, k , bitRead(temp, 7 - k)); } if (j < 162) { D[j] = S[p]; p++; } } /***************************************************************** Merge with sync vector *****************************************************************/ const static byte Sync[] PROGMEM = {1, 1, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 1, 1, 0, 0, 0, 1, 0, 0, 1, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0, 0, 0, 1, 0, 1, 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 1, 1, 0, 1, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 0, 1, 0, 0, 1, 0, 1, 1, 0, 0, 0, 1, 1, 0, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 0, 0, 1, 1, 1, 0, 1, 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0 }; for (int i = 0; i < 162; i++) { WSPRSISymb[i] = pgm_read_word(&Sync[i]) + 2 * D[i]; } WSPRSISymbGen = 1; } /***************************************************************** Parity calculator *****************************************************************/ byte WSPRSIparity(unsigned long tempo) { byte par = 0; for (int k = 0; k < 32; k++) { par = par ^ (tempo & 0x01); tempo = tempo >> 1; } return par; } |
II. Amplifier
J’utilise un amplificateur 1w trouvé sur ebay.
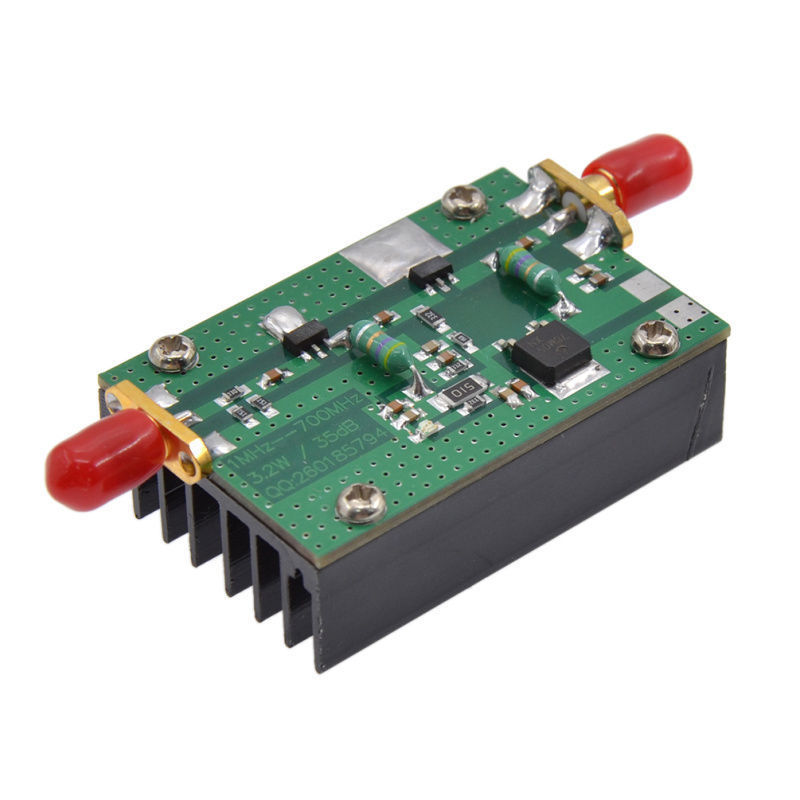
J’y ai adjoint un relai:
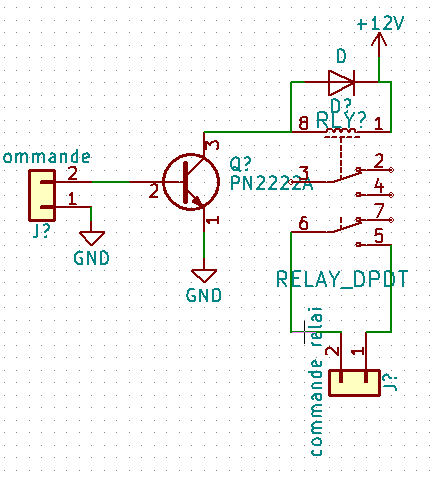
Commandé par:
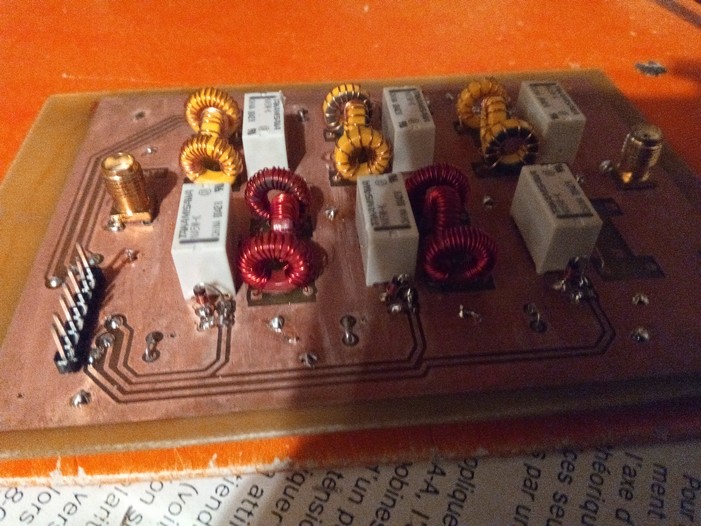
III.Platine de filtres
Kicad file here:Filtres_v3
1.Le Schema
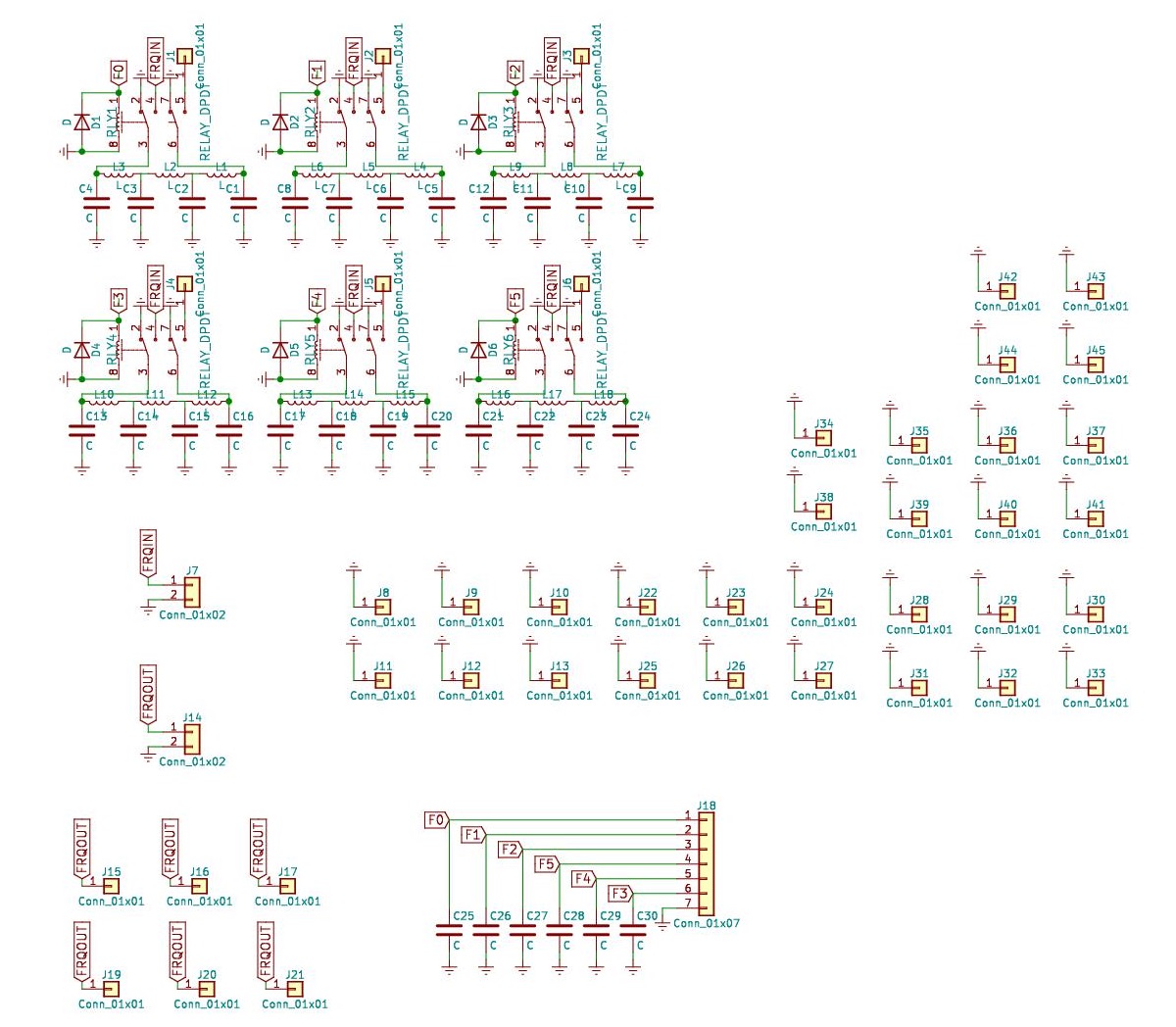
Pour les valeur des self et condensateur se reporter à excellent site:
http://www.wa4dsy.net/filter/filterdesign.html
Puis http://toroids.info/ pour le bobinage des tores.
Utilisez des FT37-2 et FT37-6.
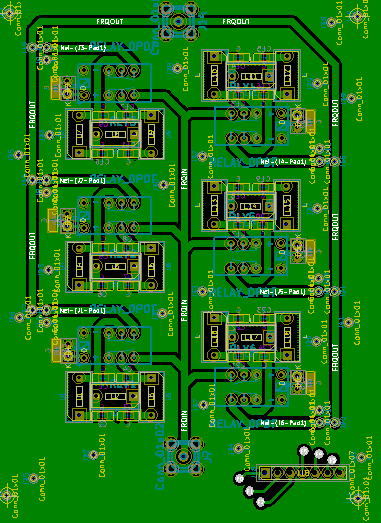
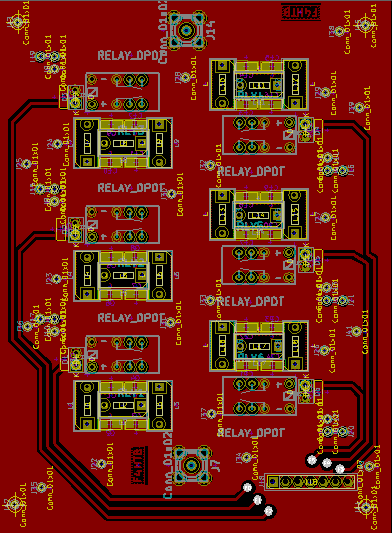
2.PCB
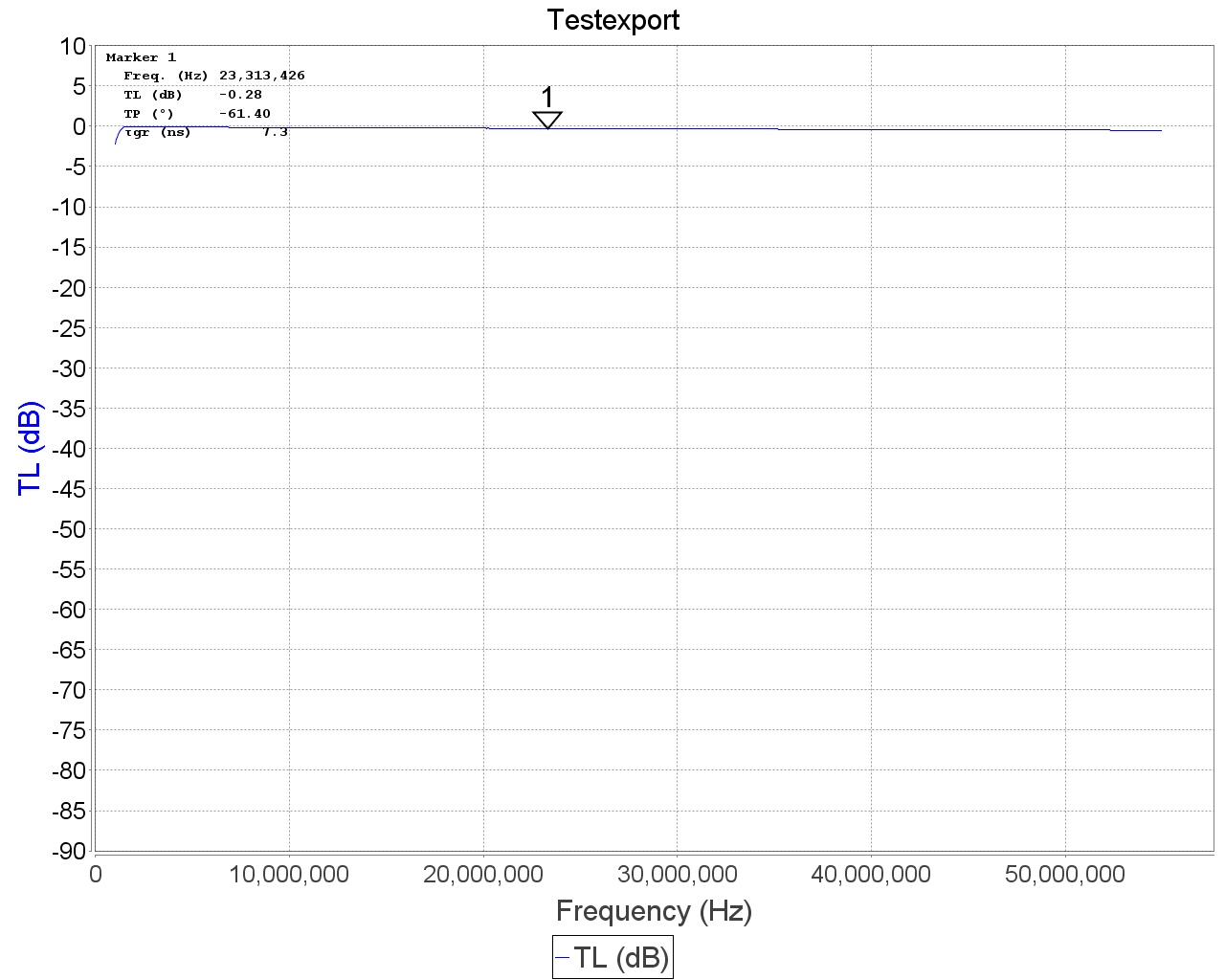
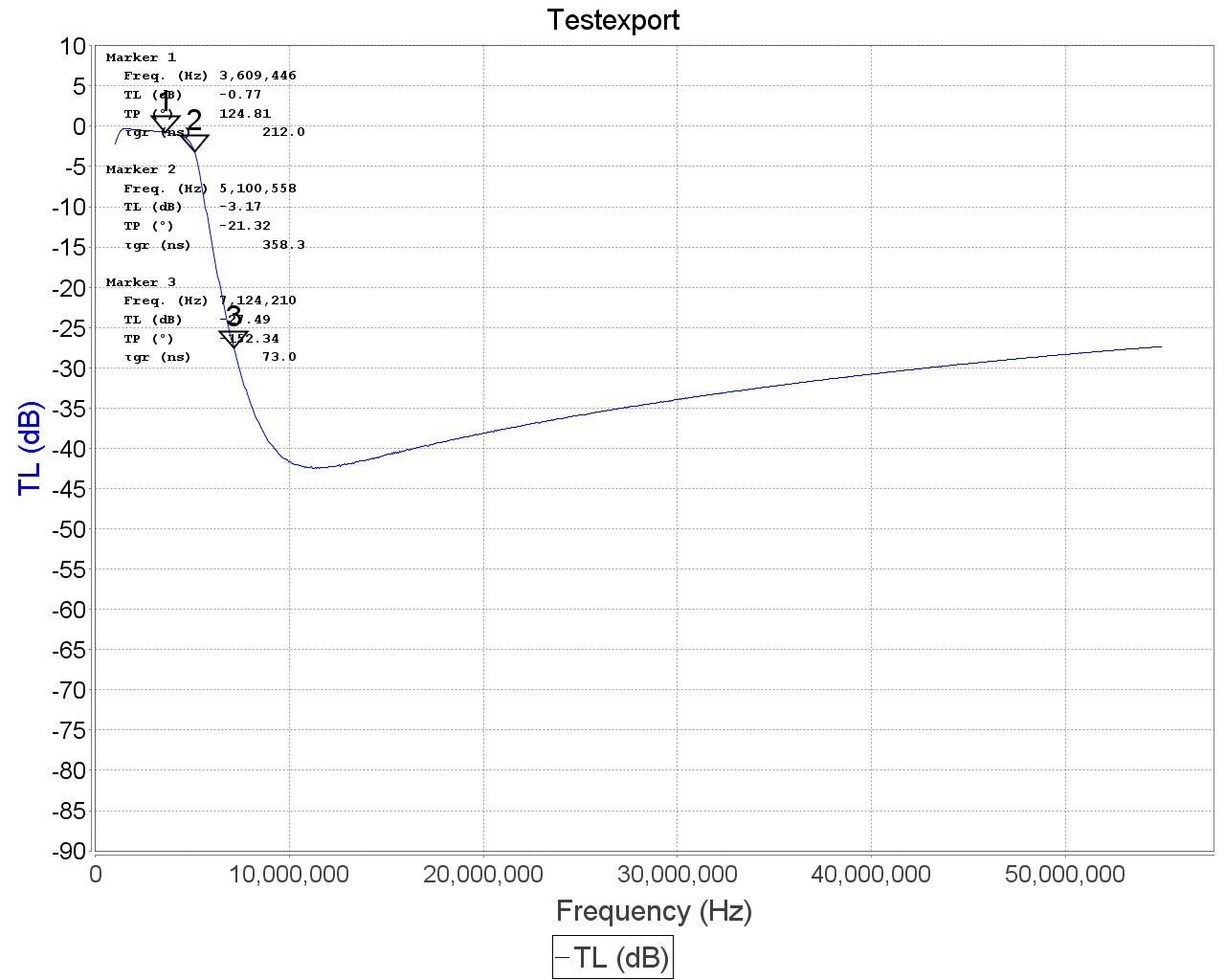
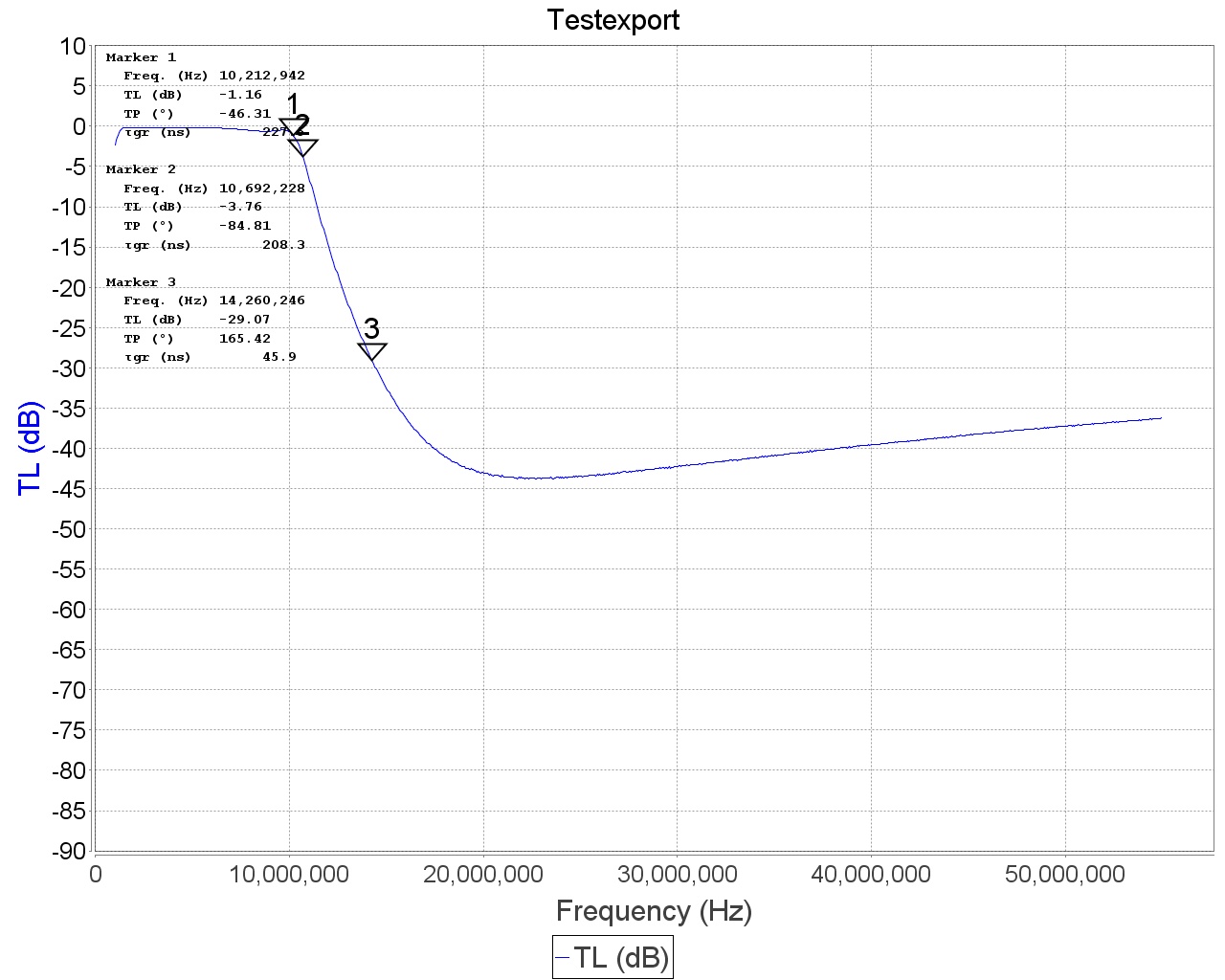
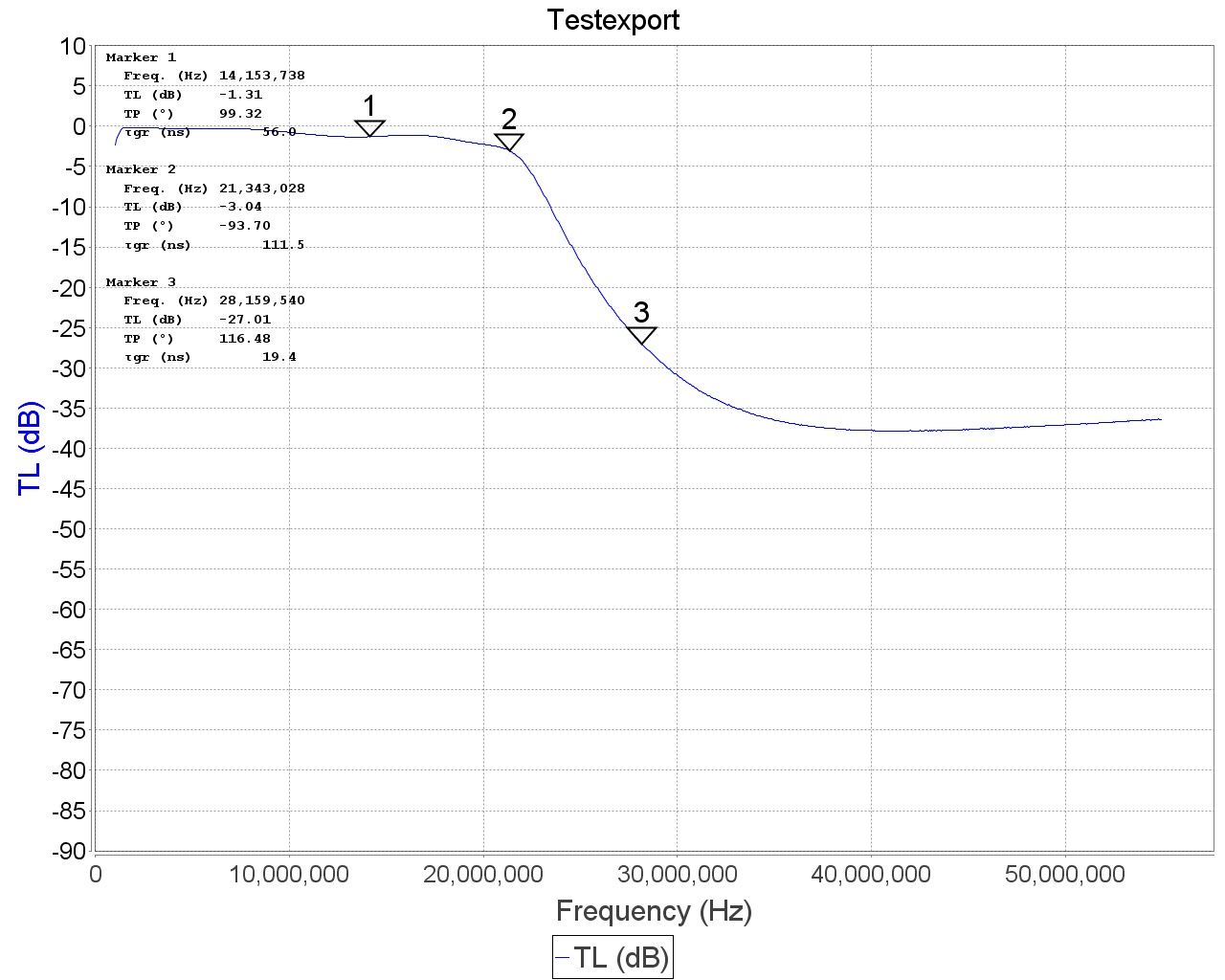
3.Mesures au VNA:
a)Le bypass pour 2222m, 630m, 50mhz et 144mhz. (filtre à mettre sur la sortie sélectionnée ou au cul de l’antenne…)
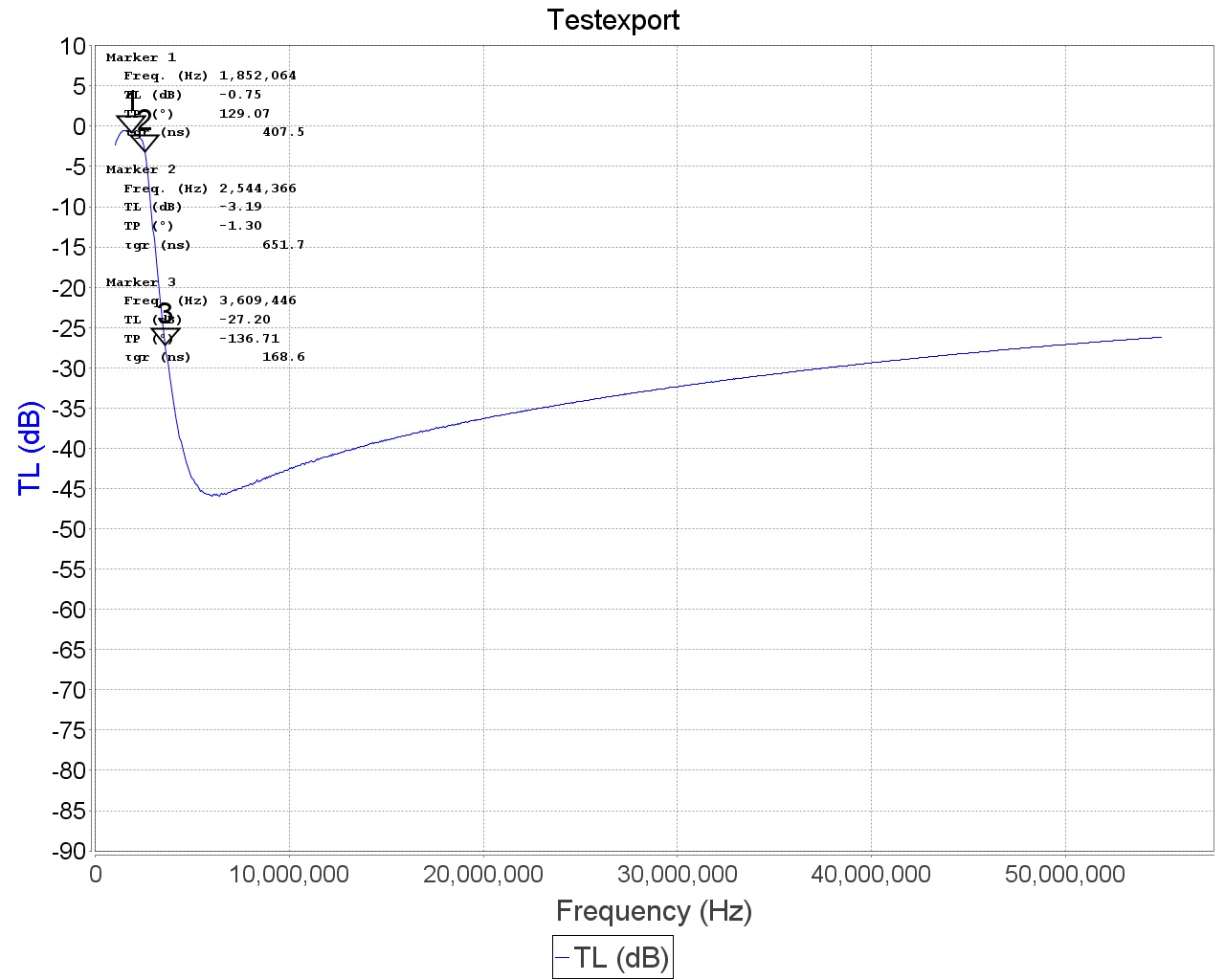
b)160m
c)80m
d)40m, 30m
e)20m, 17m
f)15m, 12m, 10m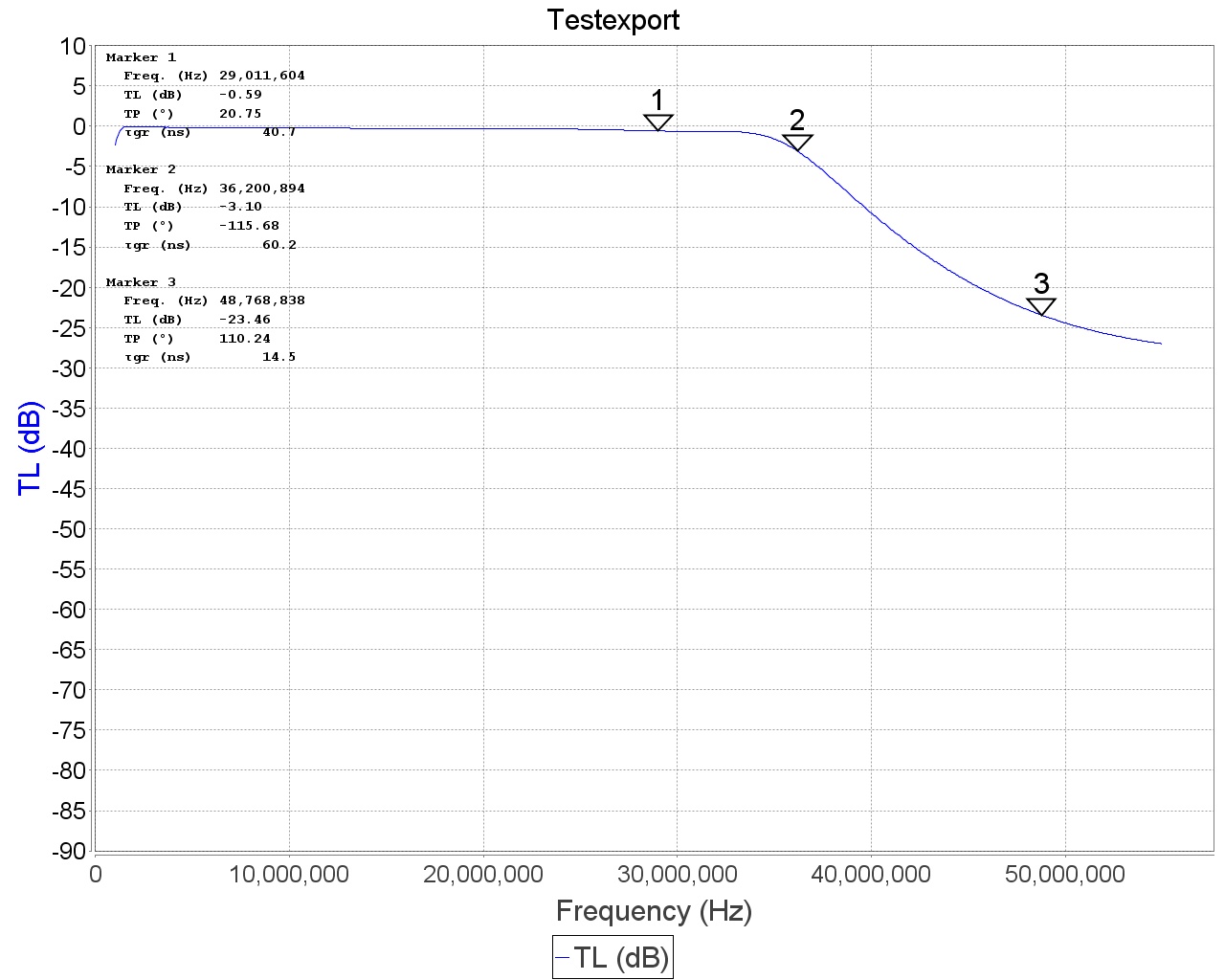
4.La photo
IV.Commutateur d’antennes
Kicad file here:commutateur_v3
1.Schéma

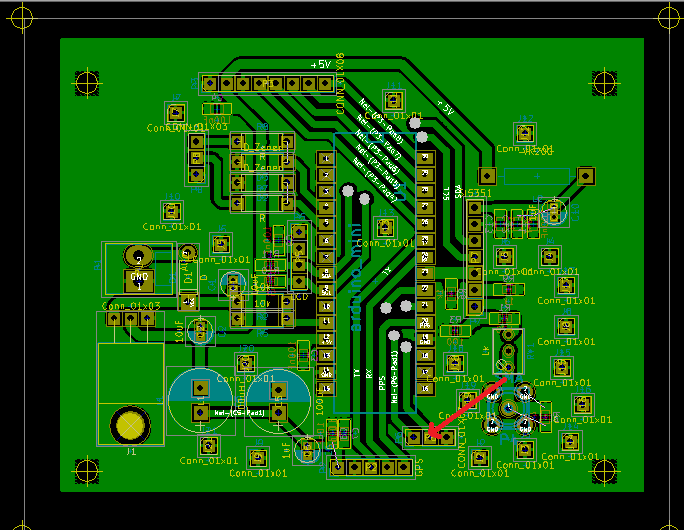
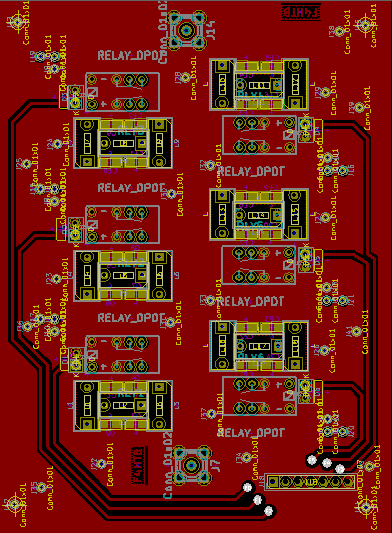
2.PCB

V.Commande filtres et antennes
1.Schéma
A venir
2.Module:
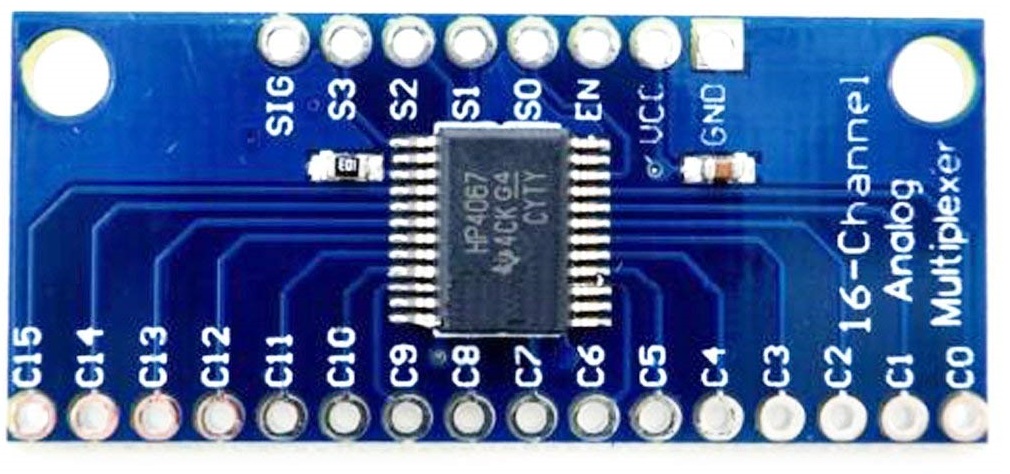
Auquel j’ai adjoint des 2N2222 + R 1Kohm.
3.Photo
In Progress!!!
TODO Liste:
-Finir platine commutateur antennes.