Projet: Fabriquer un mini rotor d’antenne élévation et azimute pour antenne arrow.
1.Prérequis
-Utiliser un microcontrôleur avec port série USB et Bluetooth.
-Petit format
-Pièces pas cher ou imprimables
-Précision convenable à définir
-Simplicité = robustesse
-Utilisable par tous
-Utilisable avec l’application look4sat?
2.Sources
https://www.sarcnet.org/rotator-mk1.html
https://www.qsl.net/dk7zb/start1.htm
https://www.arrowantennas.com/arrowii/146-437.html
https://lastminuteengineers.com/esp32-sleep-modes-power-consumption/
3.Précision visée.
En attente d’information chez arrow antenna.
Vu chez dk7zb, envisagé sur 15° azimut et 30° élévation pour un lobe à -3db.
Une précision de l’ordre de 5° me semble déjà convenable, mais on va essayer de trouver le meilleur rapport performance prix.
4.Retours des premiers tests:
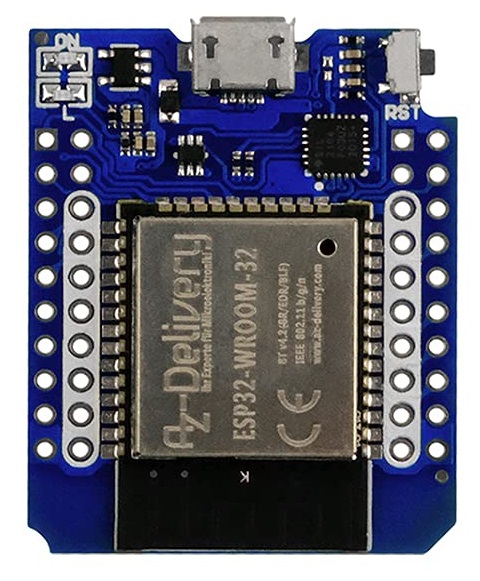
a.Utilisation d’un esp32 ou un arduino?
Je suis parti sur un esp32 puisqu’il intègre le wifi et Bluetooth.
J’aurais aimer pouvoir mettre à jour le firmware via Bluetooth mais cela semble long et avec peu de retours de la communauté.
J’envisage finalement de faire cela en wifi une fois la preuve de concept terminée.
L’esp32 est plus souple, notez : plusieurs i2c possible sur presque n’importe quelle broche. Interruption possible sur toutes les gpio.
Bonne intégration dans l’IDE arduino.
Puissance de calcul incomparable pour consommation faible (20mA en normal et 160mA avec wifi soit entre 20 et 150 heure sur la 16850 environs).
Une version mini convient mieux pour mon projet:
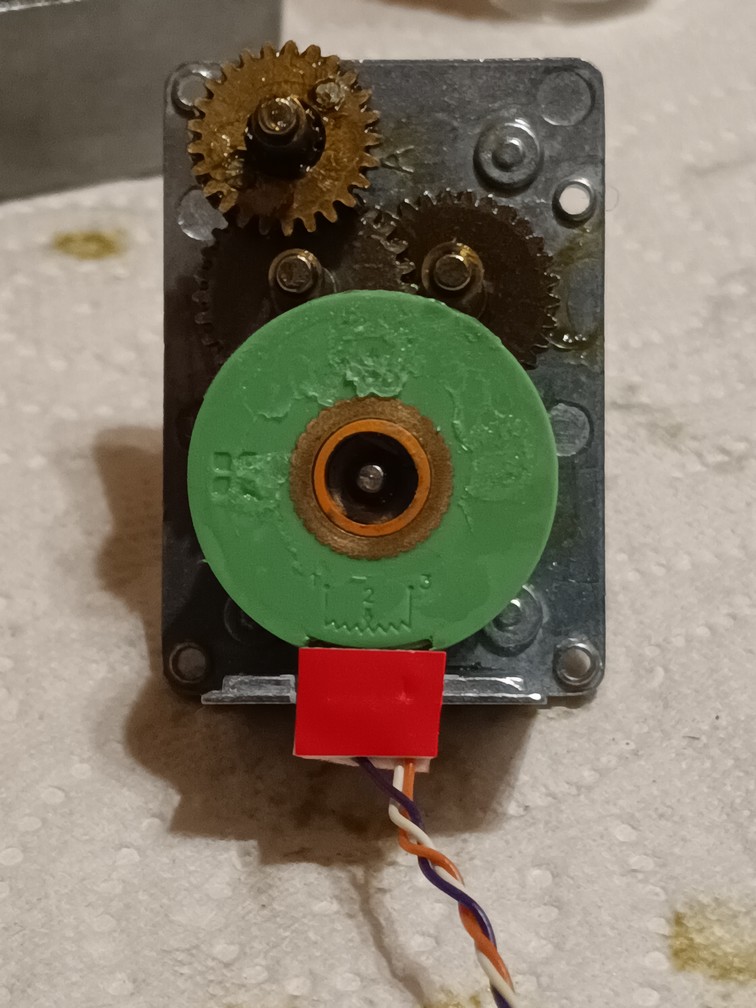
b.Moteur
J’utilise des JGY 370. Moteur répandu et pas cher.
RPM visé 5 à 10tr/min.
Pour l’élévation, il faudra trouver la bonne manière de le contrôler sur rapport cyclique pour avoir assez de force, mais en gérant la vitesse.
Peu d’information sur la version avec codeur intégré. Cela étant quelques commentaires indiquent presque 7000 ticks pour 360° sur la version 10rpm.
Couple 36kg.cm, je laisse à appréciation mais compte de toute manière compenser avec un contre poids.

Pour le moment j’ao opté pour cette version avec modification capteur hall voir plus bas.
Je suis en attente d’un version avec codeur qui pourrait rentrer dans mon boitier.

c.Contrôleur de moteur.
TB6612FNG. Faible facteur de forme. Adéquate pour ces moteurs.
Note: J’ai grillé la diode de protection lors d’un bug de programmation sur la puissance moteur et une boucle qui les faisaient vaciller. J’ai remplacé par une 1n4007 sans problèmes.
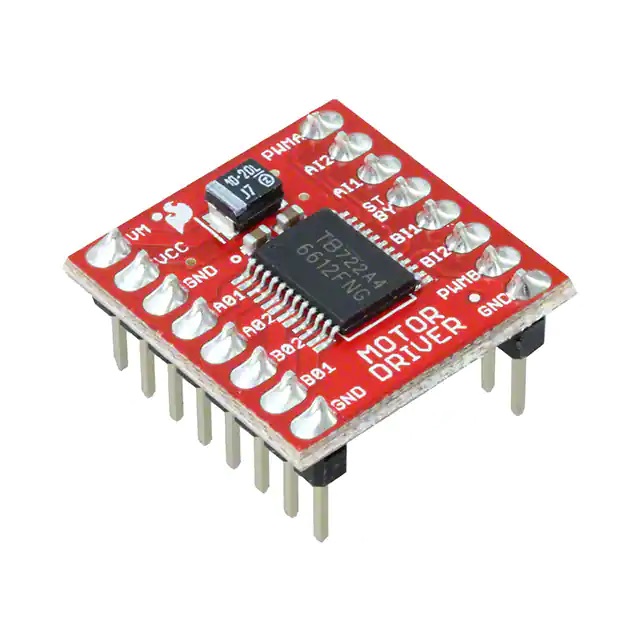
Ce module sera donc retenu pour le contrôle moteur.
d.Compas électronique
Choix porté sur LSM303DLHC car prix intéressant et informations disponibles via communauté.
Après tests il semble que seul la fonction élévation est exploitable car fonctionne sur l’accéléromètre et la gravité terrestre (comme un niveau à bulle).
La boussole ne fonctionne pas très bien car influencée par les aimants des moteurs. Cela étant, l’étalonnage étant fait, le nord reste indiqué correctement.
Il faudrait essayer d’étalonner sur un point d’écart d’élévation de 10° de 0 à 180 pour voir si on peut compenser sur le mouvement d’élévation vis à vis des courbes de champs des moteurs.
Cela permet tout de même l’élévation, la possibilité d’intégrer une fonction qui permet de mettre à niveau le trépied. La fonction d’étalonnage et l’utilisation de ce module à été une bonne expérience tout de même.
Un point important, avec un capteur précis sur arbre, cela évite de devoir prendre en compte les jeux mécaniques.

Ce module sera donc retenu pour l’élévation.
e.Capteur dans moteur.
Les premiers tests sur un moteur en 10rpm ajout deux aimant sur premier pignon me permettent d’avoir une précision de 7°.

Ceci étant, je peux en ajouter et passer sur un moteur 5rpm ce qui réduirait l’angle. Chose faire, en utilisant 8 aimants et un moteur 5rpm j’obtiens
0,4375°.

Le problème étant l’ajout incertitude sur le jeu des pignions jusqu’à sortie.
Au final il semble que la bonne veille méthode de potentiomètre résistif sans fin de course soit plus adéquate? Disponible chez Radiospare. La solution d’un potentiomètre sans buttées à 360° semblait séduisante. Malheureusement le point zero à valeur max ajout un gap de presque 20°. Ceci pourrait être exploité pour la poursuite de satellite, mais ne me convient pas.
F.Alimentation
Pouvoir alimenter l’esp32 indépendamment des moteurs et pouvoir couper l’alimentation moteur lors des tests.
-L’esp32 peut s’alimenter en 5v via usb.
-L’alimentation standard aujourd’hui est d’utiliser une 16850 liion.
Utilisation d’une NCR18650B en version protégée évite d’ajouter un bms.
Utilisation d’un module buck boost 5v vers 9 à 24v fonctionne avec la 16850 pour les moteurs.
Utilisation d’un module buck boost 16850 vers 5v pour l’esp32.
Interrupteur pour couper la 16850. L’esp32 restera allumé si connecté à un port usb.